on
Przejazd z kamerą
ArduCAM IMX219 Wide Angle Camera Module
1) Rejestruje obrazy z kamery
W systemie używam modułu „ArduCAM IMX219 Wide Angle Camera” z obiektywem typu rybie oko 170°. Wybrałem go, ponieważ jest wspierany przez Nvidię dla Jetsona Orin Nano, którego używam. Muszę zaznaczyć, że uruchomienie kamery było wyjątkowo trudne i czasochłonne — pierwszy raz spotkałem się z tyloma niuansami. Obecnie kamera pracuje w trybie zdjęciowym 1640×1232 przy 30 fps. Równolegle obrazy są streamowane na stronę WWW, co pozwala na podgląd „na żywo”.
2) Jak to teraz wygląda - czyli gdzie jestem z projektem
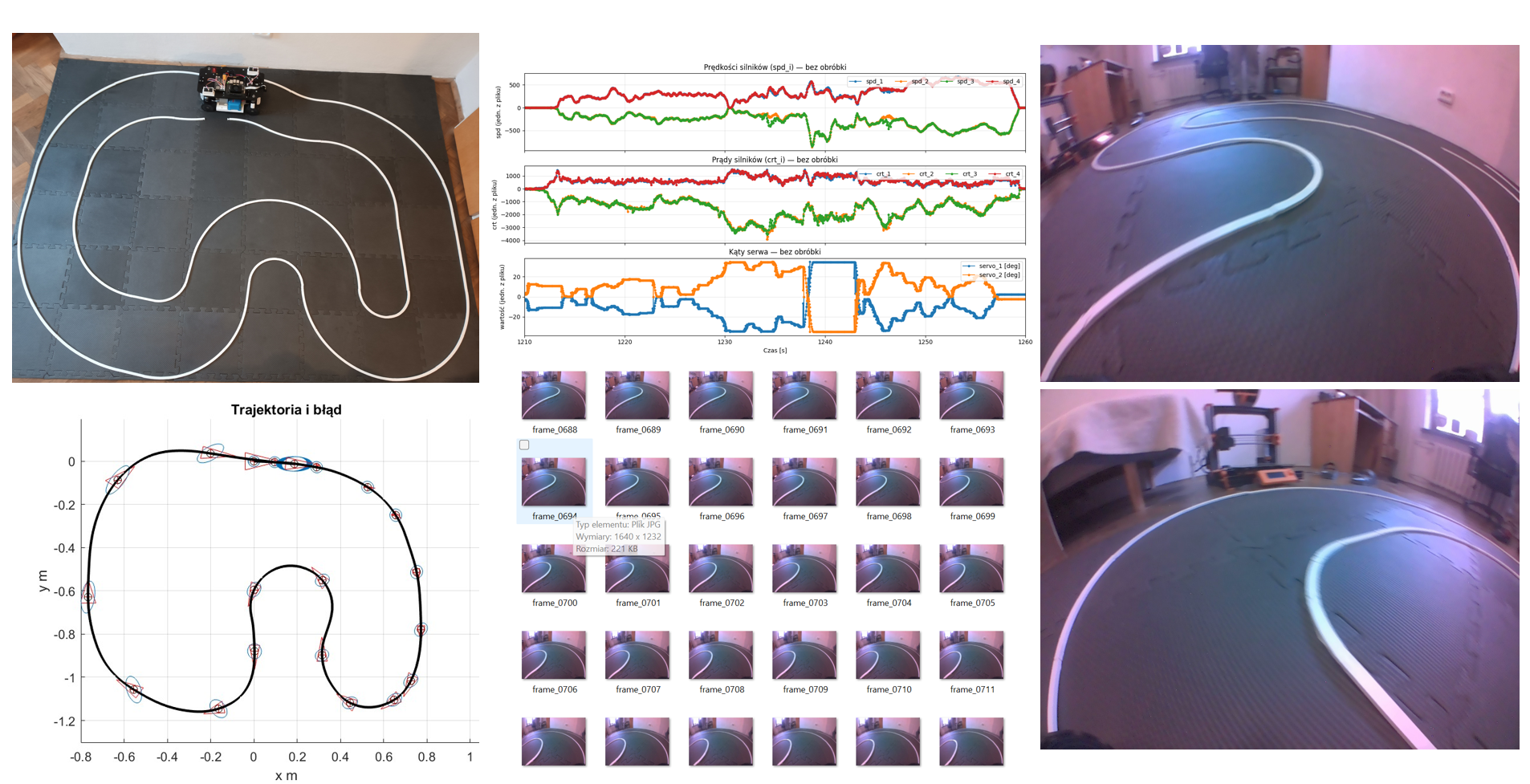
Na kolażu poniżej pokazuję aktualny stan:
-
Kolumna lewa, góra: fotografia toru jazdy. Do testów używam maty z wyznaczonymi pasami.
-
Kolumna lewa, dół: trajektoria i błędy szacowania pozycji wyznaczane wyłącznie z odometrii (model „Ackermann predict”). Widać bardzo dobre dopasowanie.
-
Kolumna środkowa, góra: surowe logi z enkoderów i silników (podstawa do odometrii).
-
Kolumna środkowa, dół: nowość — seria klatek z kamery na pojeździe, czyli „jak pojazd widzi trasę”.
-
Kolumna prawa: dwa powiększone zrzuty z przejazdu.
3 Z jakim problemem się spotkałem i jakie to niesie konsekwencję
Używam taśmy CSI do kamery która ma długość 15 cm. Próba z taśmą 30 cm zakończyła się brakiem obrazu i nagrzewaniem taśmy, więc zostałem przy 15 cm. To wymusza niskie osadzenie kamery. Podczas ostrych zakrętów tracę widoczność zewnętrznych pasów, co utrudnia segmentację i późniejsze decyzje sterujące.
4 co dalej?
-
Budowa mapy obrazów. Korekta perspektywy “fisheye” do widoku z lotu ptaka “bird’s eye view”. Do łączenia klatek rozważam RANSAC (detekcja i dopasowanie cech, odrzucanie outlierów), a następnie złożenie mozaiki.
-
Fuzja map: spróbuję scalić mapę odometryczną i wizyjną metodą bayesowską (ważenie wiarygodności źródeł).
-
Autonomia: planuję dotrenować sieć CNN „AlexNet” do autonomicznego prowadzenia po torze metodą transfer learning z uczeniem nadzorowanym. Etykiety to nastawy prędkości i kąta skrętu.
-
Agent LLM: demonstrator sterowania urządzeniami peryferyjnymi przez lokalny model LLM na Jetsonie (np. Gemma 3 lub równoważny) — wydawanie komend prędkości/skrętu oraz analiza zdjęć z kamery.