on
Skalibrowana mata i pasy 3D — testy dokładności
Pierwsza seria ćwiczeń. Przejazdy po torze modułowym i weryfikacja szacowania pozycji
Koncepcja. Środowisko do badań - składana mata i pasy ruchu
Ten post to propozycja zestawu ćwiczeń ilustrujących estymację trajektorii z przejazdu po makiecie drogi. Najpierw prezentuję samo środowisko. Makieta to czarna, składana mata oraz białe „klocki–szyny” udające pasy ruchu, wykonane w technice druku 3D. Elementy łączę na wpusty („na klik”). Przygotowałem dwa zestawy łuków o znanych promieniach $R_{\mathrm{ICR}}$: 250 mm i 500 mm (segmenty po 15°) oraz dwa zestawy prostych (długości 100 i 200 mm). Pozwala to szybko zbudować różne trasy.
Rysunek poniżej pokazuje jedną z konfiguracji toru:
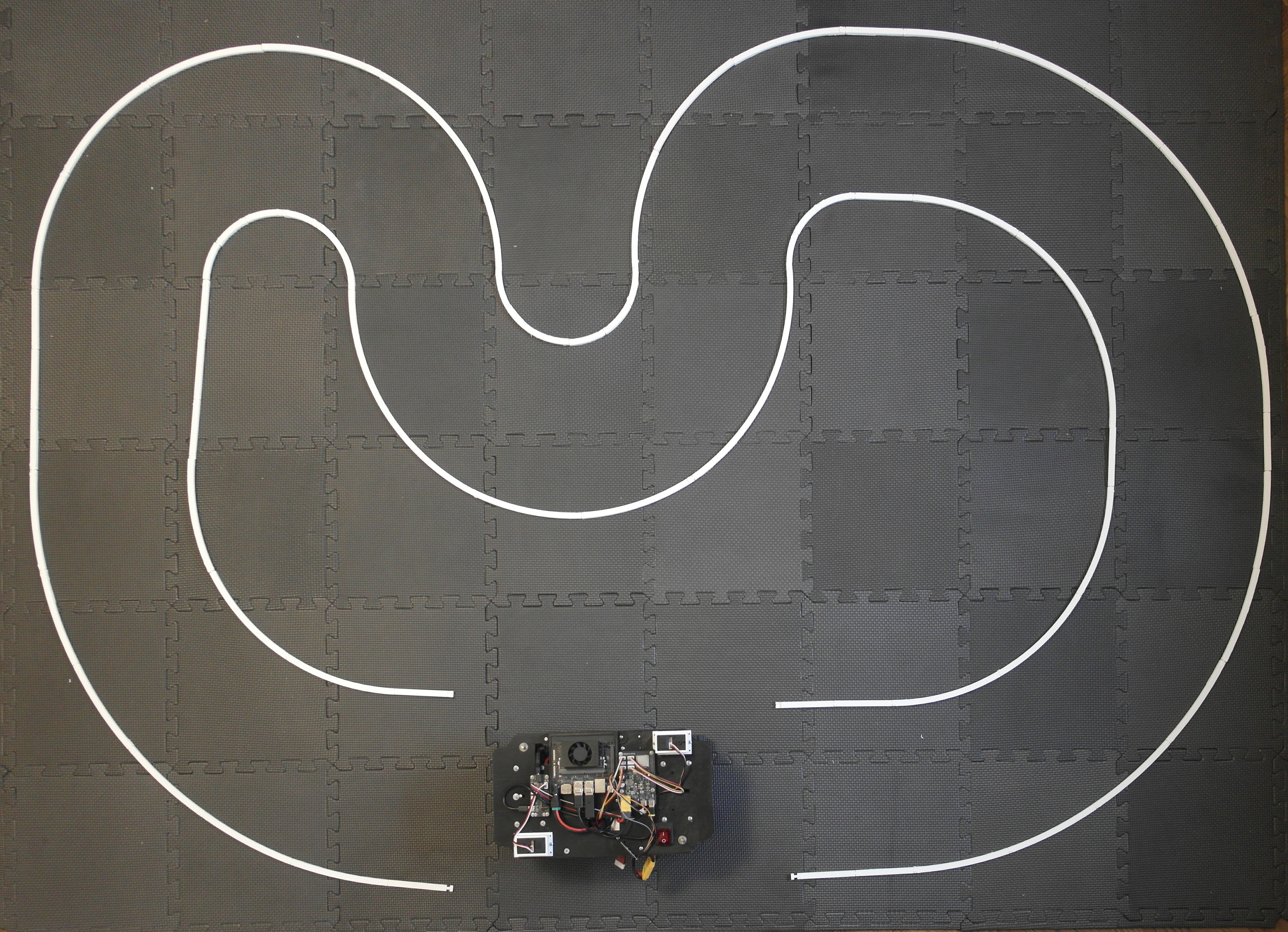
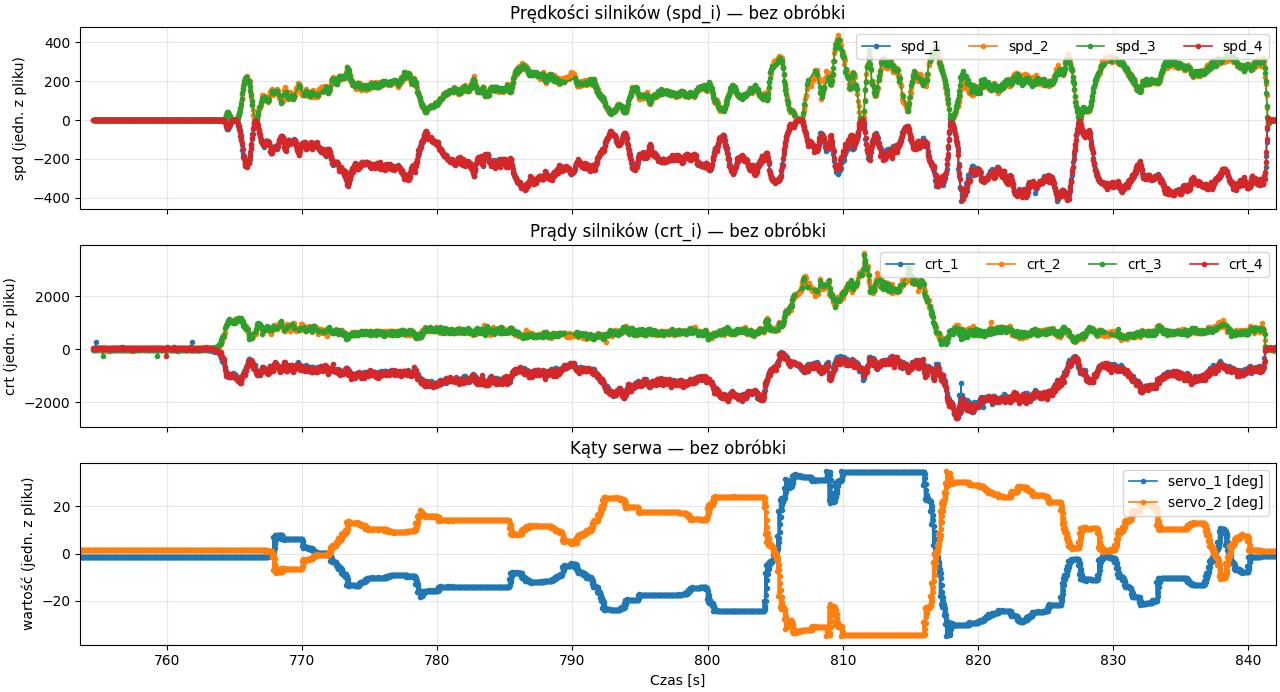
Ponieważ mata składa się z płytek o stałych wymiarach, a łuki i proste mają zadaną geometrię, traktuję trasę jako skalibrowaną. Na tak przygotowanej makiecie sprawdzam funkcjonalność modelu pojazdu i przydatność modeli obliczeniowych. Na ostrych zakrętach jadę wolno, aby ograniczyć poślizgi (pojazd nie ma dyferencjału kątowego). Poniżej surowe serie: prędkości i prądy silników oraz kąty serw (FBK) przed obróbką — dane wejściowe do resamplingu 50 Hz.
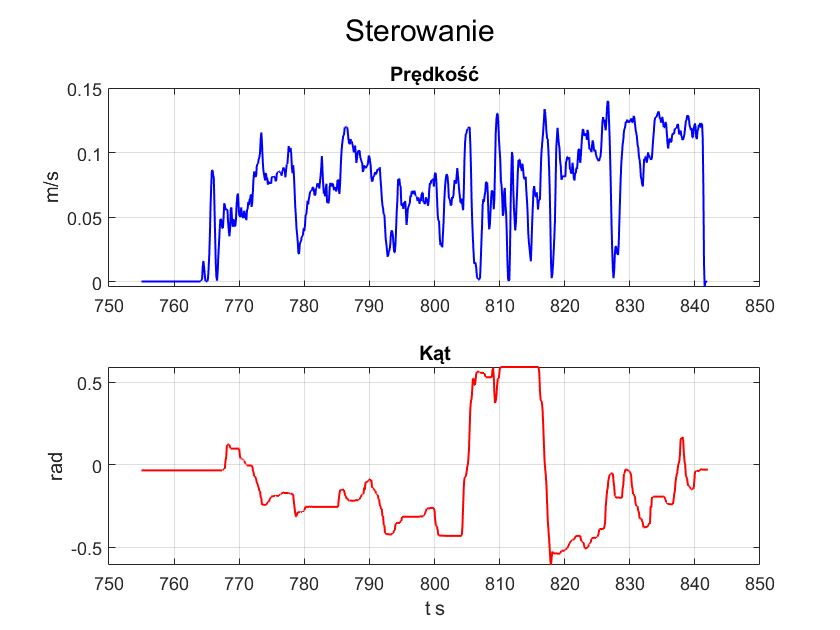
Następnie, jak wcześniej, wyznaczam sygnały sterujące w punkcie środka pojazdu:
Otrzymana trajektoria:
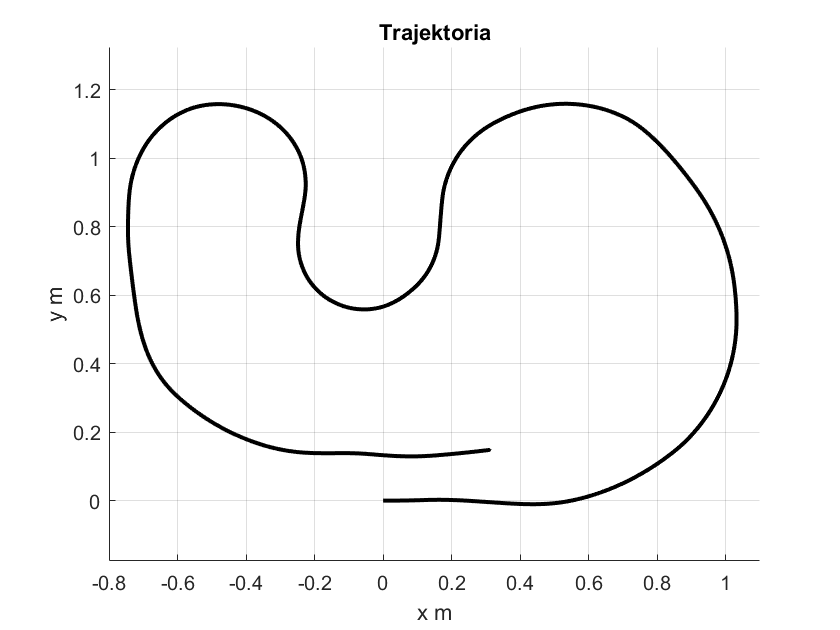
Widać rozbieżność końcowej pozycji w kierunku osi (Y) (w (X) jej nie ma — pojazd rzeczywiście zatrzymał się nieco dalej). Różnica w (Y) wynosi około 10 cm. Jest to „znoszenie”, którego prawdopodobną przyczyną jest brak dyferencjału kątowego i wynikające z tego poślizgi na łukach; przy większej prędkości odchylenie byłoby zapewne większe. Na koniec prezentuję oszacowane błędy (przy założeniu normalnych rozkładów szumów):
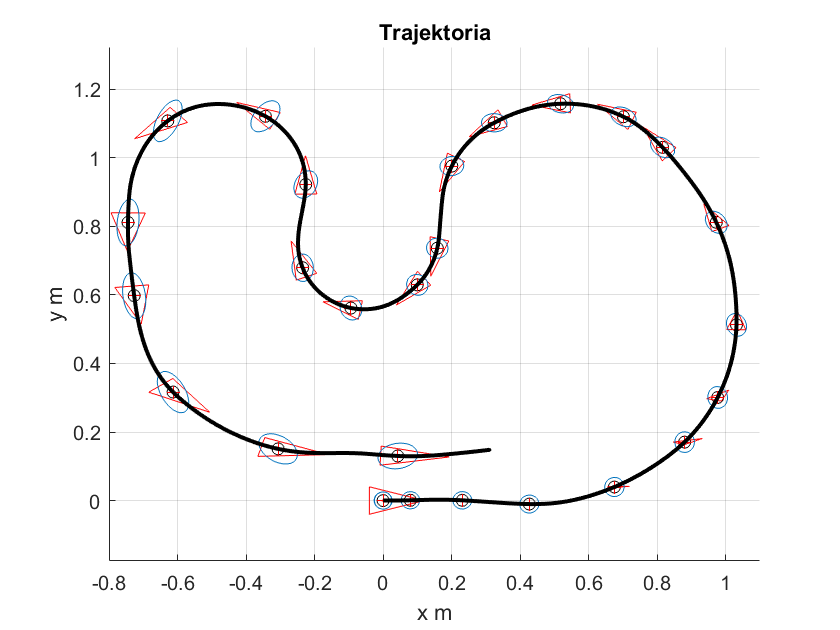
Błędy narastają powoli i przewidywalnie wzdłuż trasy, co potwierdza stabilność odometrii przy niskich prędkościach i umiarkowanych kątach skrętu.
Zadanie wprowadzające. Sprawdzenie poprawności nastaw dyferencjału
Nastaw programowo kąt skrętu na jedną z wartości $\delta \in {5^\circ,10^\circ,\ldots,35^\circ}$ i wyłącz pojazd z takim ustawieniem kół. Wolno przepychaj pojazd po macie tak, aby środek pojazdu wykonał 1–2 pełne okręgi. Zlicz obroty kół: $N_{\mathrm{in}}$, $N_{\mathrm{out}}$.
Pomiary geometryczne (bez modelu):
-
Zaznacz markerem punkt dokładnie pod środkiem pojazdu (pozycja startowa). W trakcie ruchu zaznacz co najmniej trzy kolejne pozycje środka pojazdu (najlepiej rozłożone kątowo o ok. 120°).
- Wyznacz promień okręgu przejazdu środka pojazdu z trzech punktów $A,B,C$:
-
policz długości boków trójkąta: $a=BC$ $b=AC$ $c=AB$ , -
policz pole: $A_\triangle=\tfrac{1}{2}(B-A)\times(C-A)$ , -
promień okręgu opisanego:
$ \begin{aligned} R_{\mathrm{ICR}}=\frac{a\,b\,c}{4\,A_\triangle} \end{aligned} $ - powtórz dla kilku trójek punktów i uśrednij wynik.
-
- Alternatywnie możesz użyć metody cięciwy i strzałki (dla jednej pary punktów oddalonych kątowo o co najmniej 120°):
- dla długości cięciwy $c$ i strzałki $s$: $ \begin{aligned} R_{\mathrm{ICR}}=\frac{c^{2}}{8s}+\frac{s}{2} \end{aligned} $
Obliczenia z pomiarów:
- Oblicz stosunek obrotów: $ \begin{aligned} S_{\mathrm{meas}}=\dfrac{N_{\mathrm{out}}}{N_{\mathrm{in}}} \end{aligned} $
Oblicz przewidywne wartości teoretyczne z modelu Ackermana (idealna zbieżność):
- Dla zadanego $\delta$ policz wartości teoretyczne:
$
\begin{aligned}
R_{\mathrm{ICR}}(\delta) &= \dfrac{L}{2\,\tan \delta}
\end{aligned}
$
$
\begin{aligned}
R_{\mathrm{in}}(\delta) &= \sqrt{\left(R_{\mathrm{ICR}}(\delta) - \dfrac{D}{2}\right)^{2} + \left(\dfrac{L}{2}\right)^{2}}
\end{aligned}
$
$
\begin{aligned}
R_{\mathrm{out}}(\delta) &= \sqrt{\left(R_{\mathrm{ICR}}(\delta) + \dfrac{D}{2}\right)^{2} + \left(\dfrac{L}{2}\right)^{2}}
\end{aligned}
$
$ \begin{aligned} S_{\mathrm{model}}(\delta) &= \dfrac{R_{\mathrm{out}}(\delta)}{R_{\mathrm{in}}(\delta)} \end{aligned} $
Oceń wyniki i sformułuj wnioski:
- Zestaw w tabeli dla każdej wartości $\delta$: $R_{\mathrm{ICR}}$ (z pomiaru), $S_{\mathrm{meas}}$, $S_{\mathrm{model}}$.
- Oceń konieczność korekty wzorów dyferencjału: jeśli $S_{\mathrm{meas}}<S_{\mathrm{model}}$, wprowadź współczynnik redukcji $\kappa$ tak, aby
$ \begin{aligned} \frac{n_{\mathrm{out}}}{n_{\mathrm{in}}} =\frac{1-\kappa}{1+\kappa}\;S_{\mathrm{model}} \quad\Rightarrow\quad \kappa=\frac{S_{\mathrm{model}}-S_{\mathrm{meas}}}{S_{\mathrm{model}}+S_{\mathrm{meas}}} \end{aligned} $
i podaj proponowaną wartość $\kappa(\delta)$ z eksperymentu.
Cel pierwszej serii ćwiczeń
- Zastosować odometrię 4WS (Ackermann‑predict) na danych z przejazdów.
- Przećwiczyć obróbkę logów NDJSON: import, synchronizacja, konwersje jednostek.
- Wyznaczyć trajektorię w układzie globalnym i oszacować niepewność (elipsy 3‑sigma).
- Zweryfikować wyniki na prostej makiecie z pasów (mata + wydruki 3D).
Instrukcja do tej serii ćwiczeń (pdf) jest na stronie githuba.
Materiały wejściowe
- Pliki z logami NDJSON:
out_00.txt,out_01.txt. Przygotowane wstępnie pliki będą się znajdowały na serwerze githuba. -
Parametry pojazdu: L = 260 mm, D = 153 mm, Rw = 37.25 mm, δ ≤ 35°. - Skrypty startowe (MATLAB/Python): do parsowania, resamplingu, odometrii i rysowania wykresów.
1) Import, synchronizacja, jednostki
Zadanie:
- Wczytaj log NDJSON linia po linii, rozdziel rekordy MOTOR i SERVO.
- Przekonwertuj jednostki:
- prędkości kół: spd [0.1 rpm] → v_wheel [m/s],
- kąty serw: deg → rad (kanały servo_1, servo_2).
- Wyrównaj do 50 Hz (ΔT = 0.02 s) interpolacją liniową.
- Zdefiniuj sygnały modelu:
- $V_k$ — średnia prędkość pojazdu,
- $\delta_k$ — średnia z FBK po konwersji do rad.
Wyniki:
- wykresy $V(t)$, $\delta(t)$,
- krótki opis resamplingu (2–3 zdania).
2) Odometria 4WS (Ackermann‑predict)
Równania aktualizacji stanu:
\[\begin{aligned} x_k = x_{k-1} + V_k\,\Delta T \cos \Theta_{k-1} \end{aligned}\] \[\begin{aligned} y_k = y_{k-1} + V_k\,\Delta T \sin \Theta_{k-1} \end{aligned}\] \[\begin{aligned} \Theta_k = \Theta_{k-1} + \dfrac{2 V_k\,\Delta T}{L}\,\tan \delta_k \end{aligned}\]Zadanie:
- Przyjmij $x_0 = 0, y_0 = 0, \Theta_0 = 0 $.
- Narysuj trajektorię (x, y) z zaznaczonym początkiem i końcem.
Wyniki:
- wykres trajektorii,
- komentarz: wpływ znaku $\delta$ na stronę skrętu i ICR.
3) Niepewność i elipsy 3‑sigma
Założenia:
\[\begin{aligned} P_0 = \mathrm{diag}\big(\sigma_x^2,\ \sigma_y^2,\ \sigma_\Theta^2\big) \end{aligned}\] \[\begin{aligned} Q_0 = \mathrm{diag}\big(\sigma_V^2,\ \sigma_\delta^2\big) \end{aligned}\]Macierze Jacobiego:
\[\begin{aligned} F_k = \begin{bmatrix} 1 & 0 & -V_k\,\Delta T\,\sin \Theta_{k-1} \\ 0 & 1 & \ \ V_k\,\Delta T\,\cos \Theta_{k-1} \\ 0 & 0 & 1 \end{bmatrix} \end{aligned}\] \[\begin{aligned} G_k = \begin{bmatrix} \Delta T \cos \Theta_{k-1} & 0 \\ \Delta T \sin \Theta_{k-1} & 0 \\ \dfrac{2\,\Delta T}{L}\,\tan \delta_k & \dfrac{2\,V_k\,\Delta T}{L}\,\sec^2 \delta_k \end{bmatrix} \end{aligned}\]Propagacja: $\hat x_k^{-} = f(\hat x_{k-1}, z_k)$ $P_k^{-} = F_k P_{k-1} F_k^\top + G_k Q_k G_k^\top$ $z_k = [V_k,\ \delta_k]^\top$
Zadanie:
- Przyjmij np. $\sigma_V = 0.02,\mathrm{m/s}$, $\sigma_\delta = 0.5^\circ$ (w rad).
- Narysuj elipsy 3‑sigma co 10 s wzdłuż trajektorii.
Wyniki:
- trajektoria z elipsami,
- krótki komentarz: gdzie niepewność rośnie szybciej i dlaczego.
4) Weryfikacja na makiecie: korytarz z pasów
Zadanie:
- Ułóż tor prosty i łagodny zakręt.
- Zrób przejazd prosto i po łagodnym łuku.
- Policz błąd boczny trajektorii względem osi korytarza.
Wyniki:
- wykres błędu bocznego vs. czas,
- interpretacja wpływu $V$ i $\delta$.
5) Pętla zamknięta (ósemka / pętla parkingowa)
Zadanie:
- Ułóż pętlę, wykonaj przejazd.
-
Policz wektor domknięcia: $\Delta x$ $\Delta y$ $\Delta \Theta$
Wyniki:
- trajektoria + wektor domknięcia,
- komentarz: co dominuje w błędzie.
6) (Opcjonalnie) Dopasowanie łuku
Zadanie:
- Na segmencie stałego skrętu dopasuj okrąg LS i porównaj promień z $R_c = L/(2 \tan \bar{\delta})$.
Wyniki:
- promień z dopasowania vs. teoretyczny,
- błąd względny [%].
Kryteria oceniania
Poprawność techniczna
- Import NDJSON, rozdzielenie MOTOR/SERVO.
- Konwersje jednostek poprawne.
- Resamplowanie 50 Hz opisane i poprawne.
- Implementacja odometrii 4WS zgodna ze wzorami.
- $F_k, G_k$ policzone dobrze; $Q_k, P_0$ uzasadnione.
Jakość analizy
- Czytelne trajektorie z oznaczeniami.
- Elipsy 3‑sigma poprawnie zorientowane.
- Błąd boczny obliczony; wnioski sensowne.
- Wektor domknięcia policzony i omówiony.
- Wykrywanie anomalii i wpływ filtracji.
Prezentacja i wnioski
- Podpisane osie, jednostki, legendy.
- Zwięzłe komentarze pod wykresami.
- Wnioski: gdzie i dlaczego rośnie niepewność; kiedy potrzebna korekcja.
Punktacja sugerowana
- Zad. 1–2: 30%
- Zad. 3: 25%
- Zad. 4: 15%
- Zad. 5: 15%
- Zad. 6: 10%
- Prezentacja/wnioski: 5%
Ocena 3 - 51%, 3.5 - 61%, 4 - 71%, 4.5 - 81%, 5 ponad 91%.
Uwaga praktyczna
- W tej implementacji krok „predict” opiera się na pomiarach $V, \delta$ (FBK), nie na komendach, aby uniknąć błędów od opóźnień aktuatorów.