on
Pierwsze przejazdy!
Surowe wyniki i wyznaczanie trajektorii w postprocesingu
1) Surowe dane pomiarowe
Zmienne sterujące i obserwowane zapisuję do pliku „out.txt” w formacie NDJSON (Newline‑Delimited JSON). Każda linia to niezależny obiekt JSON, co umożliwia strumieniowe przetwarzanie bez ładowania całego pliku do pamięci. Dzięki temu łatwo scalać różne strumienie logów oraz wykonywać filtrację i synchronizację w czasie. Dane z napędów i serw rejestruję co 10 ms.
Poniżej fragment surowego logu:
{"type": "MOTOR", "time": "44.535256928", "data": {"T": 20010, "id": 1, "typ": 400, "spd": 222, "crt": 351, "act": 1, "tep": 19, "err": 0}}
{"type": "SERVO", "time": "44.535667104", "data": {"setAngle": "14.557342529296875", "servo_1": "12.74", "servo_2": "-12.83", "feedback_type": "FBK"}}
{"type": "MOTOR", "time": "44.544571104", "data": {"T": 20010, "id": 4, "typ": 400, "spd": 215, "crt": 249, "act": 1, "tep": 18, "err": 0}}
{"type": "MOTOR", "time": "44.556052736", "data": {"T": 20010, "id": 3, "typ": 400, "spd": -290, "crt": -651, "act": 1, "tep": 19, "err": 0}}
{"type": "MOTOR", "time": "44.56589152", "data": {"T": 20010, "id": 2, "typ": 400, "spd": -291, "crt": -717, "act": 1, "tep": 19, "err": 0}}
{"type": "SERVO", "time": "44.574356032", "data": {"setAngle": "14.557342529296875", "servo_1": "13.45", "servo_2": "-13.54", "feedback_type": "FBK"}}
{"type": "MOTOR", "time": "44.57628272", "data": {"T": 20010, "id": 1, "typ": 400, "spd": 213, "crt": 266, "act": 1, "tep": 19, "err": 0}}
{"type": "MOTOR", "time": "44.586096576", "data": {"T": 20010, "id": 4, "typ": 400, "spd": 217, "crt": 235, "act": 1, "tep": 18, "err": 0}}
{"type": "MOTOR", "time": "44.596907488", "data": {"T": 20010, "id": 3, "typ": 400, "spd": -274, "crt": -522, "act": 1, "tep": 19, "err": 0}}
{"type": "MOTOR", "time": "44.606897056", "data": {"T": 20010, "id": 2, "typ": 400, "spd": -271, "crt": -708, "act": 1, "tep": 19, "err": 0}}
{"type": "SERVO", "time": "44.614625568", "data": {"setAngle": "14.557342529296875", "servo_1": "14.15", "servo_2": "-14.15", "feedback_type": "FBK"}}
2) Struktura i znaczenie pól
Każdy rekord zawiera typ, znacznik czasu i sekcję danych. Pole type określa źródło pomiaru: „MOTOR” dla napędów kół (DDSM400) oraz „SERVO” dla układu skrętu (ST3215). Pole time to znacznik czasu w sekundach zapisany jako tekst; w analizie rzutuję go na liczbę zmiennoprzecinkową i używam do synchronizacji. Pole data zawiera właściwe wartości telemetryczne, których zestaw zależy od typu rekordu.
MOTOR: identyfikator napędu (id), tryb/typ ramki (typ), prędkość obrotowa (spd), prąd (crt), temperatura (tep), flaga aktywności (act), kod błędu (err).
SERVO: zadany kąt (setAngle) oraz dwa kanały sprzężenia zwrotnego z enkoderów (servo_1, servo_2), plus typ ramki (feedback_type).
W feedback_type rozróżniam:
-
ACK — potwierdzenie przyjęcia komendy (po ustawieniu pozycji/prędkości/konfiguracji),
-
FBK — ramka telemetryczna ze sprzężenia zwrotnego (bieżący stan serwa).
To właśnie FBK wykorzystuję w postprocessingu do wyznaczania kąta skrętu δ (konwersja ze stopni na radiany i ewentualna fuzja kanałów servo_1/servo_2).
3) Parsowanie i synchronizacja
Plik przetwarzam strumieniowo. Każdą linię parsuję jako JSON i — wg pola type — kieruję do dekodera MOTOR lub SERVO. Następnie:
-
normalizuję jednostki (kąty: deg→rad; prędkości: na SI),
-
łączę strumienie po czasie, otrzymując spójną serię do obliczeń trajektorii,
-
w razie potrzeby filtruję anomalie (np. rozbieżności servo_1 vs servo_2), wygładzam szum i wykonuję interpolację,
-
resampluję do interwału 20 ms (50 Hz), aby ujednolicić krok obliczeń.
4) Jednostki i wagi według dokumentacji. Obróbka danych
Skale wynikają z dokumentacji:
-
DDSM400: prędkość spd w dziesiątych części rpm (0.1 rpm), prąd crt w mA.
-
ST3215: kąty w stopniach.
Konwersje do SI:
-
prędkość liniowa koła: $v = 2\pi R_w \cdot \mathrm{spd}/60$ (po uwzględnieniu skali 0.1 rpm),
-
kąt skrętu: $\delta = \mathrm{deg}\cdot \pi/180$.
Model obliczeniowy wymaga jednej pary zmiennych sterujących {prędkość, kąt skrętu}. W logach mam cztery prędkości silników i dwa kąty skrętu. W tej fazie przyjmuję uśrednianie:
-
prędkość pojazdu jako średnia z prędkości kół (ze znakiem i jednostkami po konwersji),
-
kąt skrętu jako średnia z kanałów FBK (servo_1, servo_2) po konwersji do rad.
Tak przygotowany sygnał zasila model 4WS do wyznaczania trajektorii środka geometrycznego w globalnym układzie.
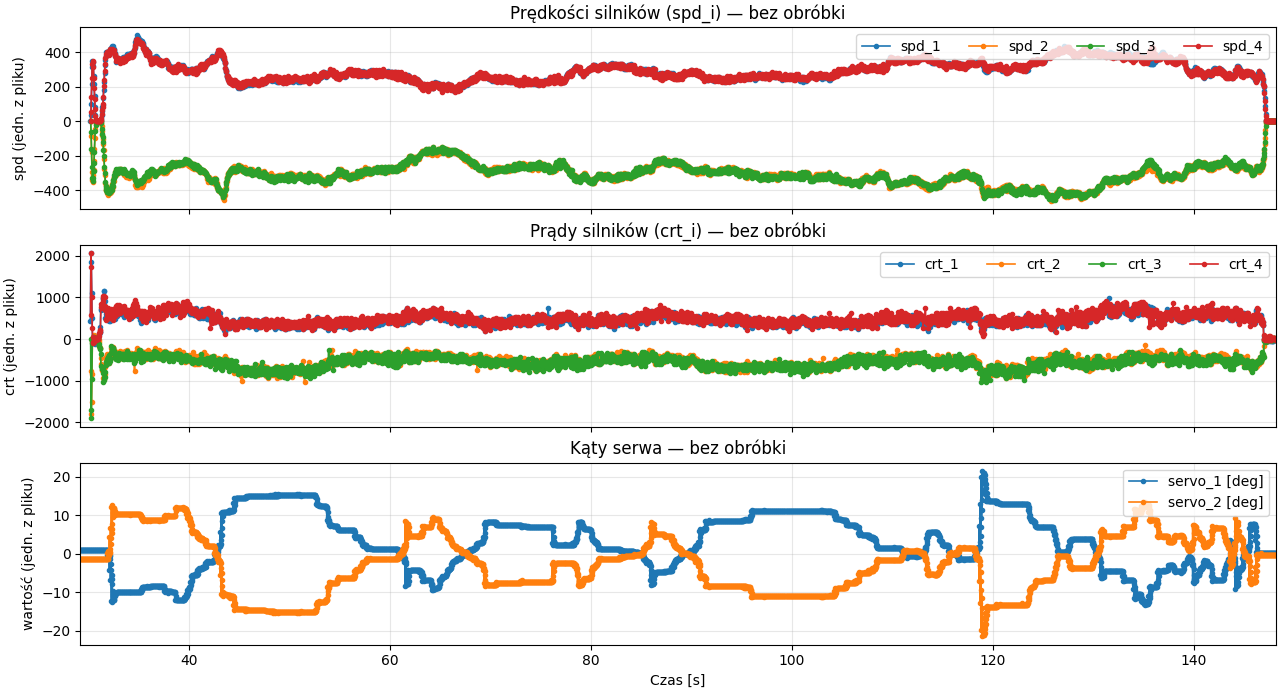
5) Przejazd 1
Pierwszy rysunek pokazuje wykresy surowych serii: prędkości i prądy silników oraz kąty skrętu serw — bez ingerencji, w jednostkach z plików.
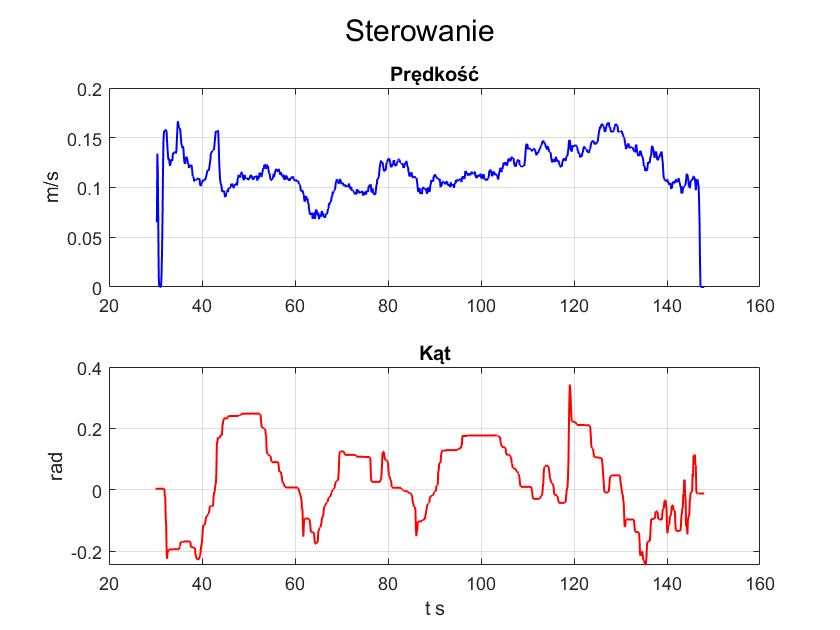
Drugi rysunek przedstawia uśrednione wartości prędkości pojazdu i kątów skrętu wyrażone w jednostkach SI.
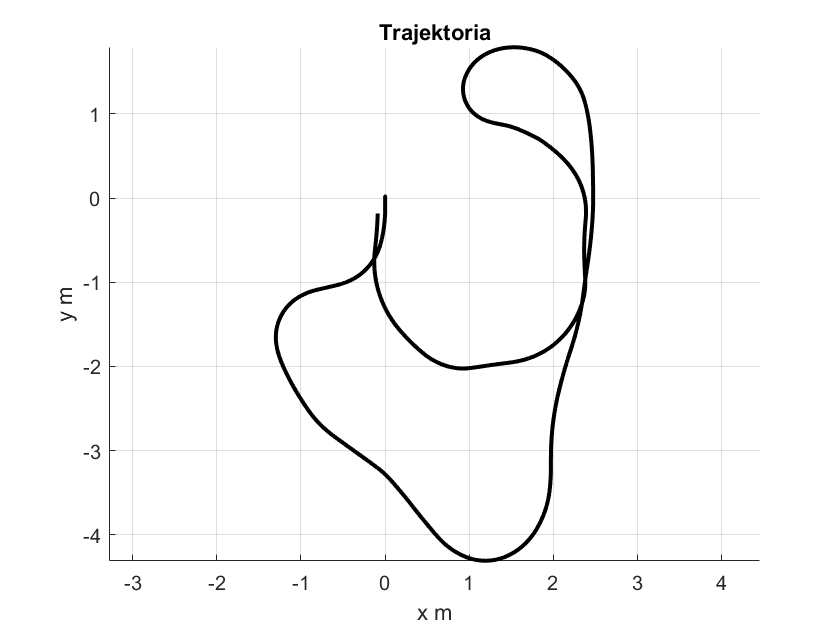
Trzeci rysunek to uzyskana trajektoria w globalnym układzie współrzędnych. W chwili początkowej pojazd znajdował się w punkcie [0, 0]. Po wykonaniu pętli wrócił w przybliżeniu w to samo miejsce.
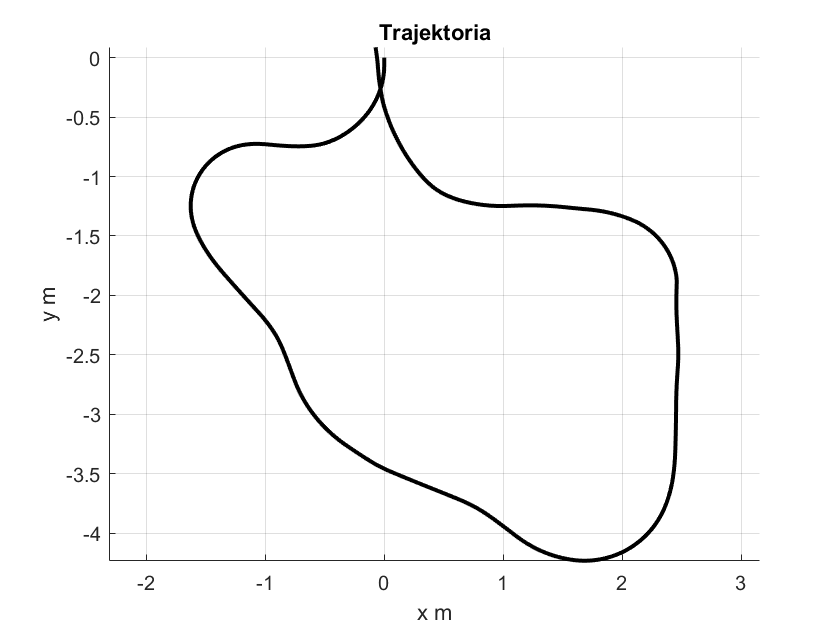
Ponieważ trajektorię wyznaczam na podstawie modelu, ta metoda obliczeniowa daje dodatkową możliwość: można symulacyjnie sprawdzać wrażliwość estymacji położenia na zmianę parametrów. Łatwo pokazać, że modyfikacje rozstawu osi $L$ lub promienia koła $R_w$ istotnie wpływają na wynik integracji. W praktyce jednak oba te parametry są dobrze określone w projekcie (geometria) i w danych technicznych napędów, więc ich niepewność jest niewielka. Znacznie ważniejszy jest inny czynnik: ewentualny offset kąta skrętu lub luz w układzie sterowania. Nawet niewielkie przesunięcie nastawy o stałą wartość potrafi systematycznie „skrzywić” trajektorię. Obliczeniowo można wykazać, że już dodanie stałego offsetu $+0.5^\circ$ do kąta $\delta$ prowadzi do zauważalnego odchylenia toru — błąd narasta z długością przejazdu, ponieważ każdorazowo integrujemy nieco inną krzywiznę $\kappa = \tfrac{2}{L}\tan(\delta)$. W praktyce:
- Warto wprowadzić przejazdy przez punkty kontrolne o znanej pozycji (markery na macie). Porównanie pozycji z odometrii z pozycją referencyjną pozwala korygować offset kąta skrętu i oceniać dryft.
- Dobrym kierunkiem jest dodanie prostych czujników pozycjonowania, np. tagów RFID (Radio Frequency Identification) w wybranych punktach trasy (bramy kontrolne). Odczyt RFID daje „twardą” korektę położenia w konkretnych miejscach i ogranicza kumulację błędu odometrii.
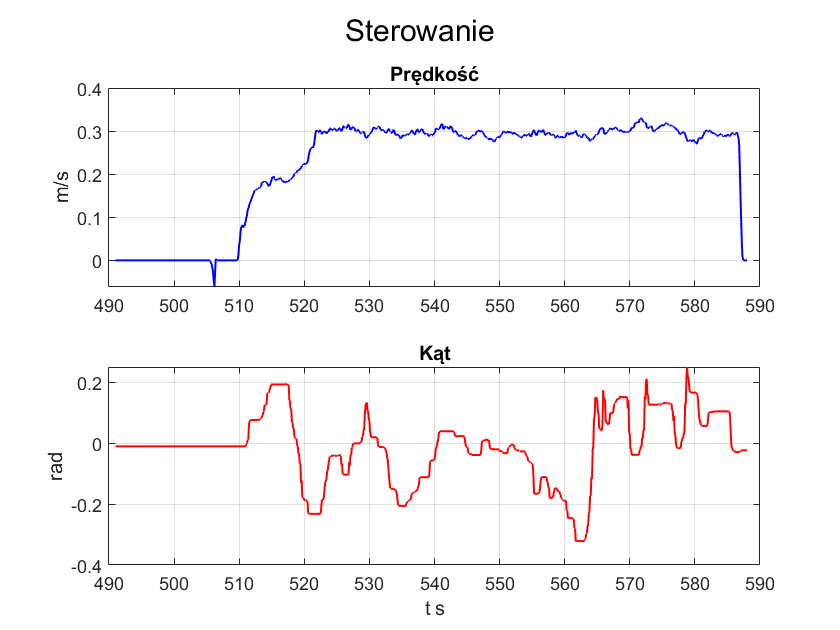
6) Przejazd 2
Drugi przejazd był dłuższy — pojazd wykonał dodatkową pętlę w drugim pomieszczeniu. Jak poprzednio, wszystkie sygnały rejestrowałem. Poniżej surowe serie w jednostkach z plików.

Uśrednione wartości w jednostkach SI:
Trajektoria w układzie globalnym. Start z [0, 0]; po pętli powrót w pobliże punktu startu.
7) Wnioski
Podczas jazd pojazd poruszał się z minimalną prędkością około 0.15 m/s. Kąty skrętu były umiarkowane (±15°). W tych warunkach poślizgi boczne w łukach były niewielkie. Dzięki brakowi luzów w układzie kierowniczym pojazd poruszał się po płaszczyźnie drogi z wysoką powtarzalnością. Enkodery o rozdzielczości 4096 imp/obr zapewniły dokładne odczyty prędkości i kątów. Testy potwierdziły, że zakładane efekty modelowania i postprocessingu zostały osiągnięte.
Przeprowadziłem również dłuższe jazdy. W sesjach do 30 minut. W tych przejazdach, mikrokomputer Jetson ani razu się nie zawiesił podczas rejestracji danych, co potwierdza poprawność projektu pod względem: komunikacji i zasilania.
Dodatkowo potwierdziłem wrażliwość trajektorii na stały offset kąta skrętu: nawet +0.5° systematycznie zniekształca tor. Dlatego kluczowa jest kalibracja zer serw i okresowa kontrola luzów.
Cele dydaktyczne
-
Od surowych logów do wglądu: nauczysz się zamieniać strumień NDJSON (MOTOR/SERVO) w czyste, zsynchronizowane dane w SI, gotowe do obliczeń.
-
Ruch „widoczny” w liczbach: zbudujesz sygnały $V_k$ i $δ_k$ z pomiarów, sprawdzisz ich jakość (zgodność kanałów, zakresy) i zobaczysz, jak przekładają się na trajektorię.
-
Nauczysz się stosować proste reguły kontroli jakości i resamplingu, by Twoje wykresy i wnioski były powtarzalne i wiarygodne.
8) Co dalej
W kolejnym wpisie pokażę rachunek niepewności i propagację błędu dla zastosowanego modelu, a następnie włączę obserwator (filtrację) do bieżącej estymacji trajektorii.